#include <udp_connection.hpp>
◆ UdpConnection()
| UdpConnection::UdpConnection |
( |
rclcpp::Node::SharedPtr | node | ) |
|
◆ sendToDevice()
| void UdpConnection::sendToDevice |
( |
const io_interfaces::msg::RawPacket | msg | ) |
|
◆ spin_once()
| void UdpConnection::spin_once |
( |
| ) |
|
◆ udpCallback()
| void UdpConnection::udpCallback |
( |
const std::vector< byte > & | datagram | ) |
|
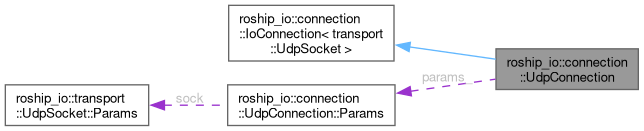
◆ params_
| Params roship_io::connection::UdpConnection::params_ |
|
protected |
◆ raw_pub_
| rclcpp::Publisher<io_interfaces::msg::RawPacket>::SharedPtr roship_io::connection::UdpConnection::raw_pub_ |
|
protected |
◆ raw_sub_
| rclcpp::Subscription<io_interfaces::msg::RawPacket>::SharedPtr roship_io::connection::UdpConnection::raw_sub_ |
|
protected |
◆ sock_ptr_
◆ timer_
| rclcpp::TimerBase::SharedPtr roship_io::connection::UdpConnection::timer_ |
|
protected |
The documentation for this class was generated from the following files:

 Public Member Functions inherited from roship_io::connection::IoConnection< transport::UdpSocket >
Public Member Functions inherited from roship_io::connection::IoConnection< transport::UdpSocket >